Robotic Manipulators
ME 4290 // Completed December 2020
SUMMARY
The robotic manipulator course studies the classification and applications for mechanical manipulator systems. Both parallel and serial robots are studied and compared. Key topics of this course include: Manipulator motion, forward kinematics transformation, solutions of inverse kinematic equations, velocity kinematics, manipulator dynamics, trajectory generation and control schemes.
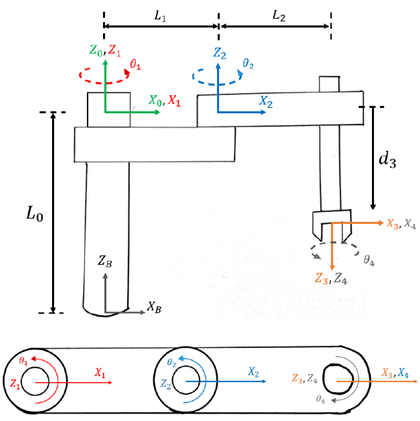
The following report is an example of the simulated resolve rate control for an Adept 550 SCARA robot (shown below). The characteristics of the SCARA robot are described including the link lengths, Denavit-Hartenberg (DH) Parameters and the overall kinematic diagram.
The 3D SCARA trajectory, using the simulated resolved rate solution, is shown for the specified motion in the diagram below. This image was developed with MATLAB.

The report in its entirety can be found below as submitted in November of 2020.