Linear Systems and Controls
ME 3012 // Completed April 2020
SUMMARY
The Linear Systems and Controls course explores the modeling and formations of mechanical systems. This includes the steady-state and transient dynamic responses. Additional fundamental theory of automatic controls and applications are covered.
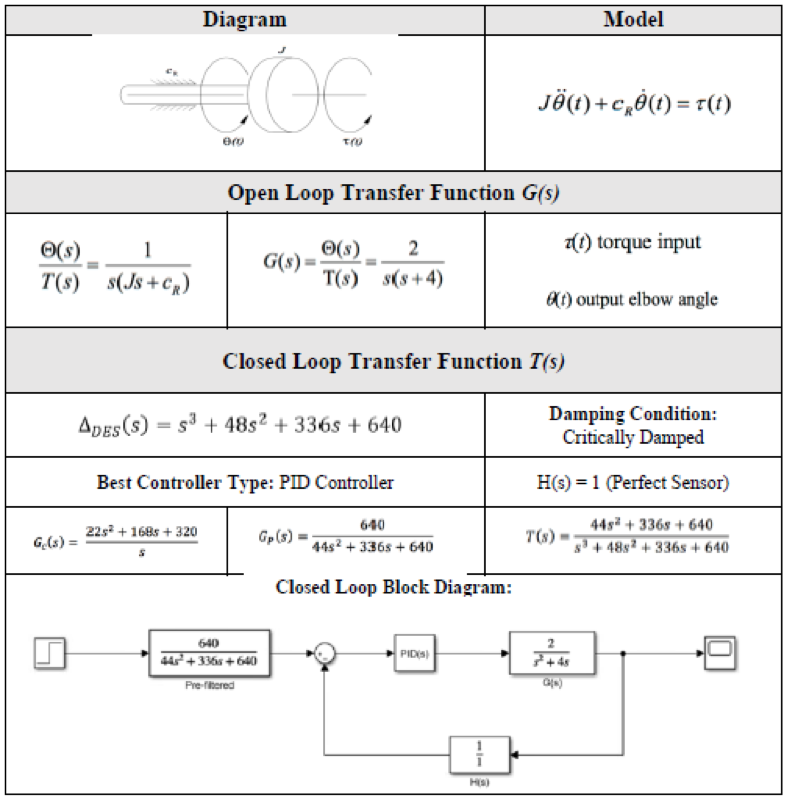
A final project is assigned as a comprehensive review and students can decide their controls problem as a group. Our group chose to analyze a robot arm elbow. MATLAB and Simulink are used as a tool to analyze the controls of the arm. A summary of our group’s results are shown in the table below:
The report in its entirety can be found below as submitted in April of 2020.